









世界最大の乗用六脚クモ型ロボット「Megahex」が製造されました。このロボットは、当初3ヶ月で完成する予定でしたが、失敗、故障などを何度も繰り返し1年半を費やしています。このロボットを作ろうと思ったきっかけ、製造に苦労したところ、このロボットで何ができるのかについて、海外YouTubeチャンネル「Hacksmith Industries」が解説しています。
*Category:テクノロジー Technology *Source:Hacksmith Industries,ytscribe
乗用六脚クモ型ロボット「Megahex」は、どのように完成したのか?

「Megahex」の構想は、ショベルカーがバケットを使って立ち上がり操縦する様子を見たときに「もし、もっと多くの脚があったら?もし、もっと巨大にすることができたら?」と疑問に思ったことがきっかけです。

そこで、さっそく計画を始めました。当初は、6台のショベルカーを溶接して、すべてのエンジンを配線し、脚を設置するだけであれば3ヶ月もあれば完成すると考えられていました。
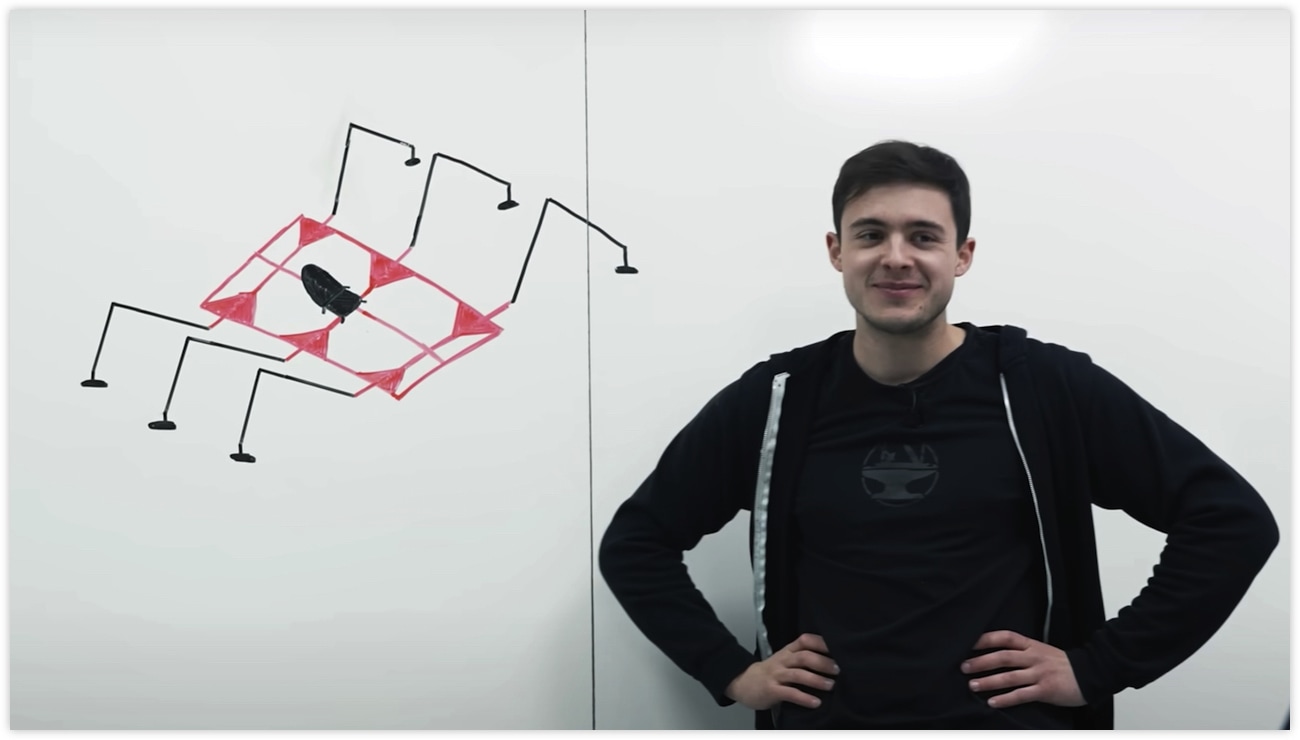
実際に、最初の1ヶ月は計画通りに作業が進みました。しかし、あまりにも巨大過ぎてバランスが悪くなってしまいました。その問題を改善するために、土台を六角形にし、精密な操作ができる脚でバランスを取る必要があります。

その後、6つの脚を設置し、問題なく体を持ち上げられるのかという実験を行いました。「Megahex」に4人の運転手が乗り込み、各自2つの脚を慎重に操作します。
少しぎこちないところもありましたが、「Megahex」は6つの脚で自立することに成功します。

試行錯誤の結果、「Megahex」の脚はバケットからヘキザポッドフットに変更されました。なぜなら、バケットは地面を掘るには最適でしたが、体を持ち上げるには向いていなかったからです。

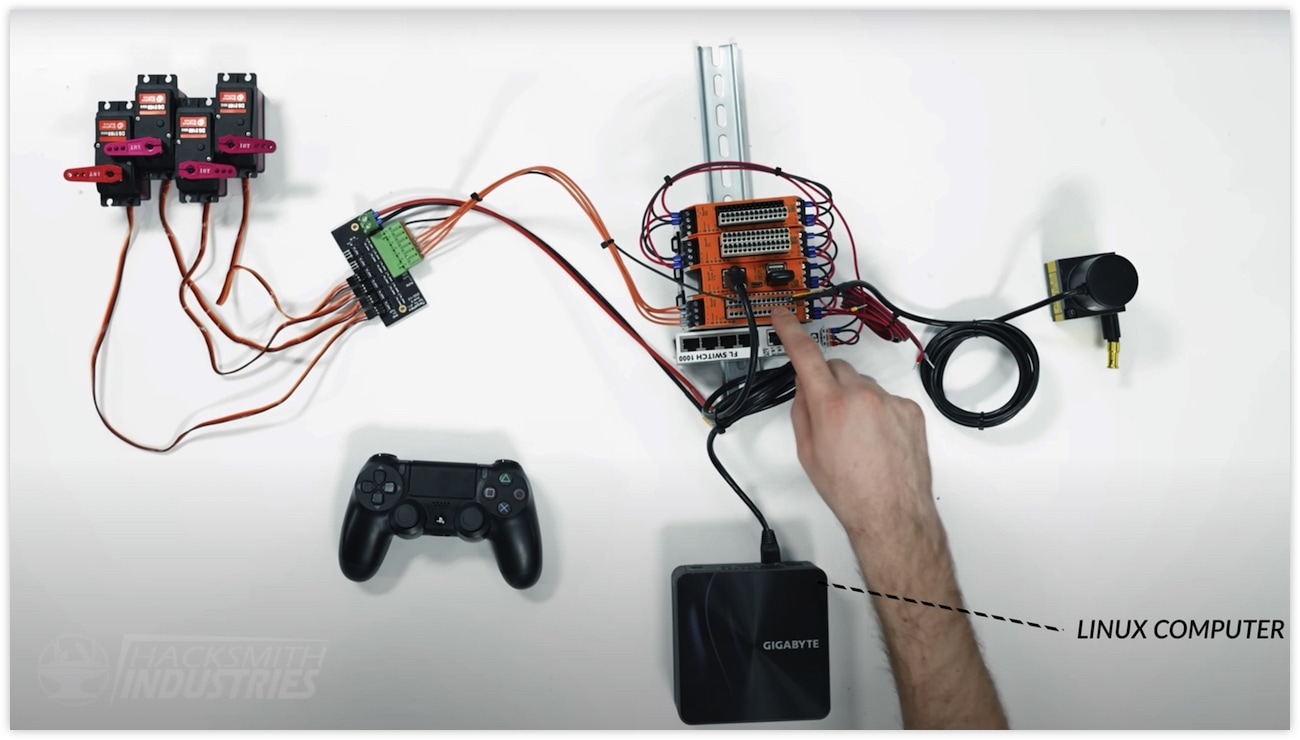
そして、一人でロボットを運転できるように、コンピュータで制御する必要があります。「Megahex」の制御は「Linuxコンピュータ」で行います。このコンピュータは、ユーザーの入力をもとに、個々の脚をどのように動かすかを計算する役割を担っています。
何時間ものトラブルシューティングを行い「Megahex」のハードウェアとソフトウェアの統合が行われました。まずは、歩行シミュレーションを行います。エンジンをかけて、一歩を踏み出すように命令してみます。しかし「Megahex」は、一歩を踏み出せませんでした。関節を動かすプログラムか構造に問題があるようです。
また、エンジンによる発熱も問題でした。内部の一部の部品は100℃を超えていたのです。
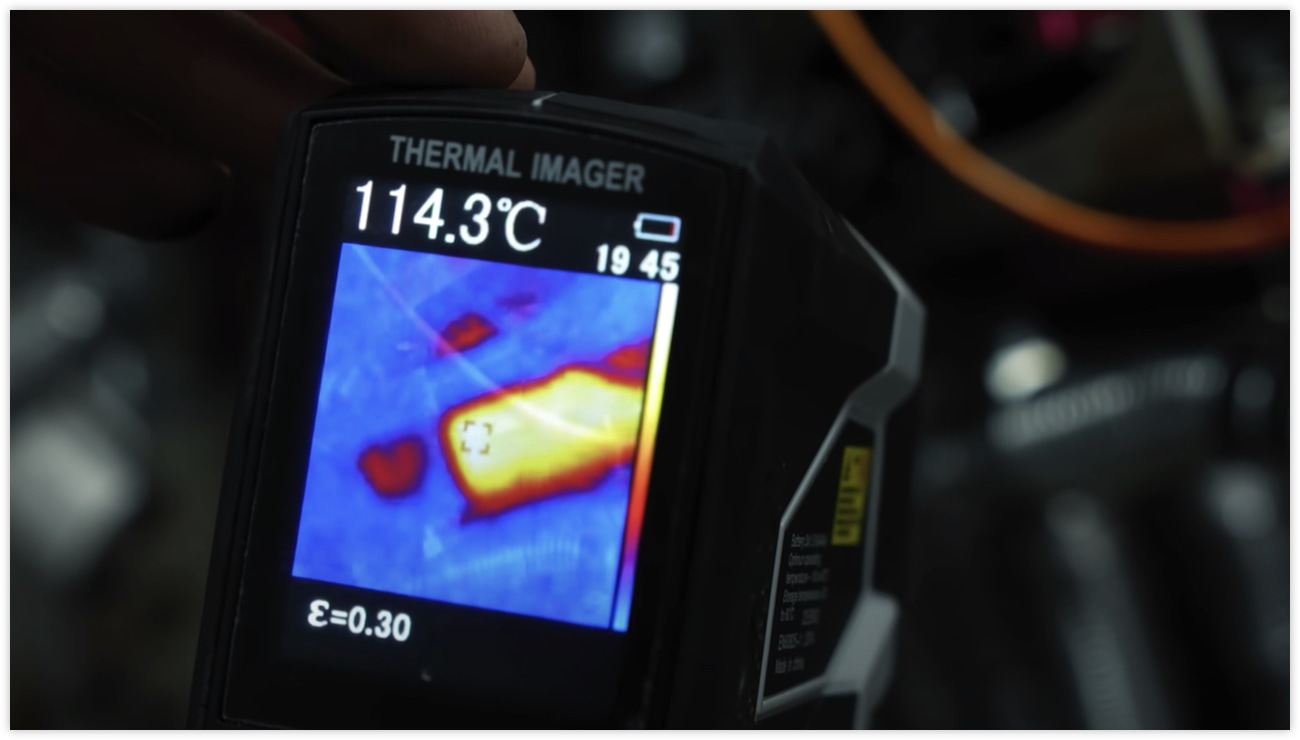
その問題を改善するために、コンピューターファンをつけて、新鮮な空気を送り込むなどの処置を行いました。ところが、発熱の問題は改善されませんでした。そのため、新しいエンジンを搭載することになりました。エンジンを取り替えるためには、古いポンプをすべて取り外し、油圧機器をすべて分解する必要があります。エンジンの交換には2週間ほど時間がかかったようです。
この時点で5カ月、予定より2カ月もオーバーしています。しかし、まだ一度もまともな立ち上げテストが行われていません。いかに「Megahex」の製造が難しいかを物語っています。
そして、ようやく6つのエンジンをすべて始動させ、ロボットが自立できるかを確認します。今回、人間は誰も乗り込みません。全てがコンピュータ制御です。計画ではボタンを押すだけで「Megahex」が立ち上がるはずです。

ボタンを押すと「Megahex」は、立ち上がりました。しかし、その直後、死んだクモのように脚を丸めてしまったのです。油圧の問題か、ソフトウェアの問題か、電気的な問題か、あるいは単にバルブが動かなくなったのか……

ただ、幸いなことに、すべてのデータに目を通したところ、単純なコードのミスであることが判明しました。そこで、コードを修正して、再度テストを行います。
ついに「Megahex」はコンピュータ制御だけで立ち上がったのです。

次は「Megahex」を外に持ち出して、広いスペースを歩き回れるかのテストをしました。しかし、テストの結果、歩き回ることはできませんでした。「Megahex」は脚を上げて踏み出すことはできましたが、地面を引きずって前に進む力は無いようです。
「Megahex」の脚の力を増すために、脚の圧力を2倍にしました。

その結果、まだ完璧ではありませんが、かなり動きが良くなりました。人間を乗せても問題無く動作しています。
その後も、少し進んで、またトラブルが発生して、少し進んで、と苦戦しながらも製造は進み続けました。

そして、ようやく「Megahex」はコンピュータ制御だけで動き回ることに成功したのです。

当然、人を乗せて動き回ることも可能です。

しかし、突然、脚の1つが折れてしまいました。

翌日、折れた脚を溶接しましたが、再度、フレームがねじれて半分に裂けてしまいました。

2週間かければ、また修正することはできるようですが「Hacksmith Industries」は、ここで実験を終了することにしたそうです。なぜなら、6つの脚で巨大なロボットを持ち上げ、歩き回ることには成功したからです。
「Hacksmith Industries」は「Megahex」の製造で多くの資金を使い、多くの失敗を経験しました。しかし、それ以上の学習機会を得ることができたと喜んでいるようです。
オリジナルサイトで読む : AppBank
世界最大の〝多脚ロボット〟を1年かけて自作したYouTuberの実話