







200年ほどの歴史を持つ「カメラ」ですが、その構造や機能はとても複雑なものになっています。そんなカメラの仕組みについて写真家のバルトス・チェハノフスキー氏が3Dモデルを使用して詳しく解説しています。
カメラに被写体がどのように映るかを3Dモデルで解説したサイトはこんな感じ
200年ほどの歴史を持つ「カメラ」ですが、その構造や機能はとても複雑なものになっています。そんなカメラの仕組みについて写真家のバルトス・チェハノフスキー氏が3Dモデルを使用して詳しく解説しています。
Cameras and Lenses – Bartosz Ciechanowski
https://ciechanow.ski/cameras-and-lenses/
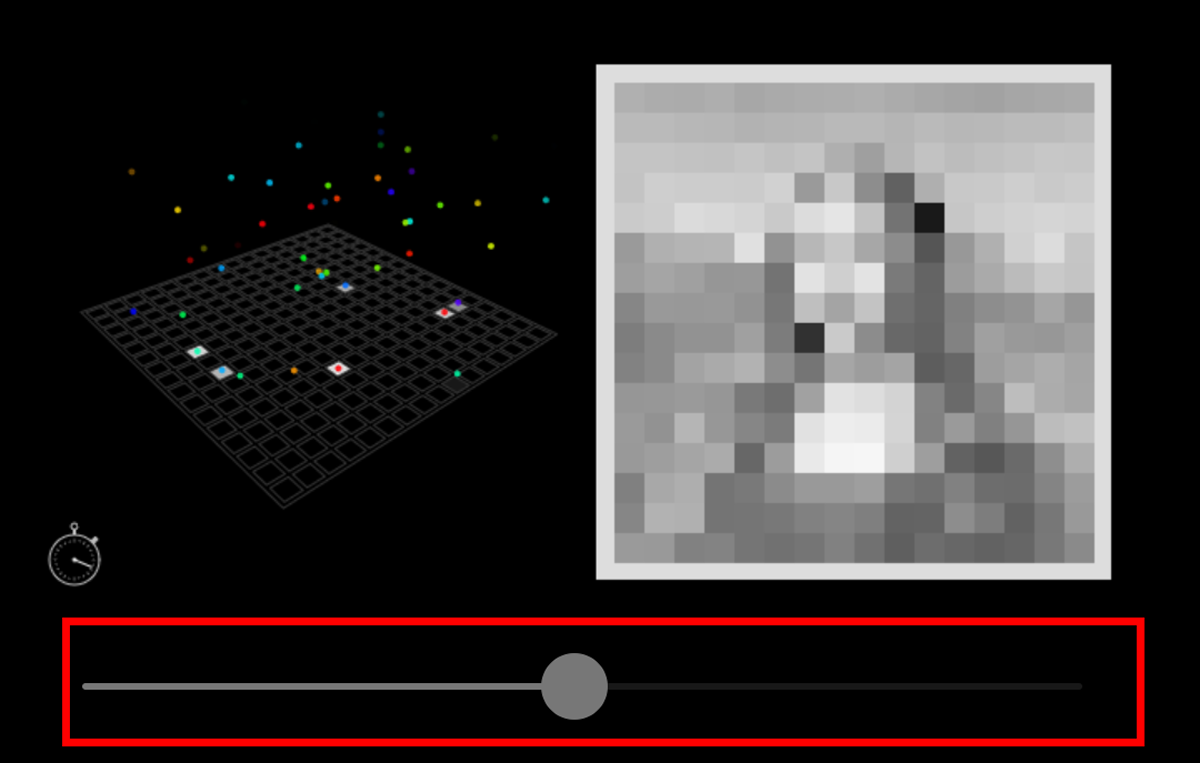
チェハノフスキー氏はカメラを初歩的な機能や原理から順に解説しています。最初に行われるのは、写真撮影にまず必要な「光」についての話。デジタルカメラにはイメージセンサーと呼ばれる光検出器があり、格子状に配置されています。イメージセンサーは光子を測定可能な電流に変換するもので、イメージセンサーに当たる光子が多いほど信号は高くなるとのこと。
灰色のバーを左右に動かすことで時間を進め、格子状に配置された小さなイメージセンサーに光子が通過する様子を確認できます。各イメージセンサーによって読み取られた信号は右側に表示されている画像ピクセルの明るさに変換されます。光子の収集時間が長いほどイメージセンサーに当たる光子の数が多くなり、画像内のピクセルが明るくなります。光子の収集時間が短いと露出不足となり画像は暗く、収集時間が長いと露出オーバーとなり画像は明るくなります。
光子にはさまざまな色がありますが、イメージセンサーはその色を認識せず光子の強度のみを検出します。色を認識させるためには光子を個別のグループに分ける必要があるとのこと。検出器の上に小さなカラーフィルターを設置することで赤や緑、青の光のみを認識することが可能になります。サイトでは、バーを動かすことで特定の色のみがフィルターを通過する様子を確認することができます。
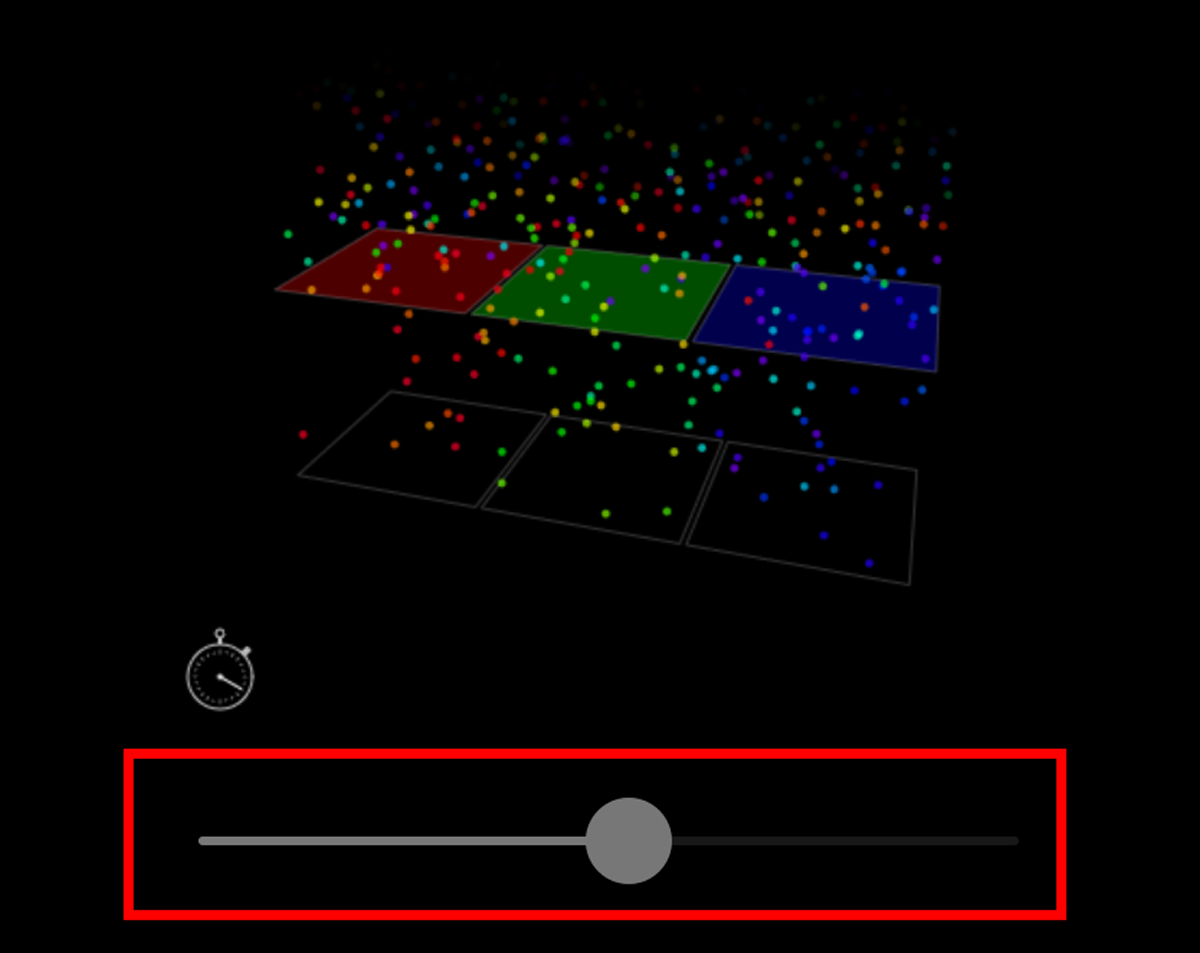
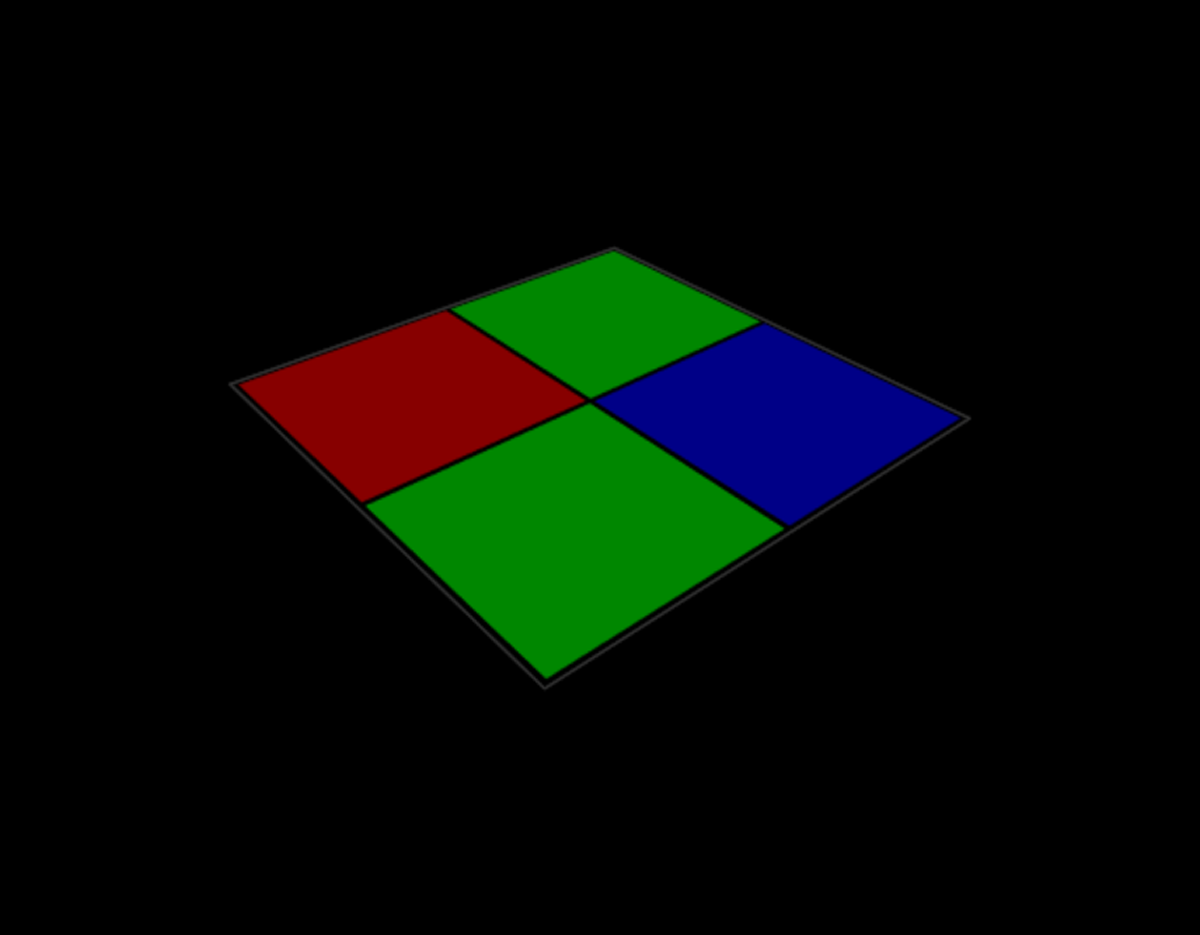
このようなフィルターはいくつかの配置方法がありますが、最も単純なものはベイヤーフィルターと呼ばれるもの。人間の目が認識しやすい緑のフィルターを2枚、青と赤のフィルターを1枚ずつ2×2のマスに配置したもので、この配置を複製しつなぎ合わせることで広範囲で色を認識することが可能です。
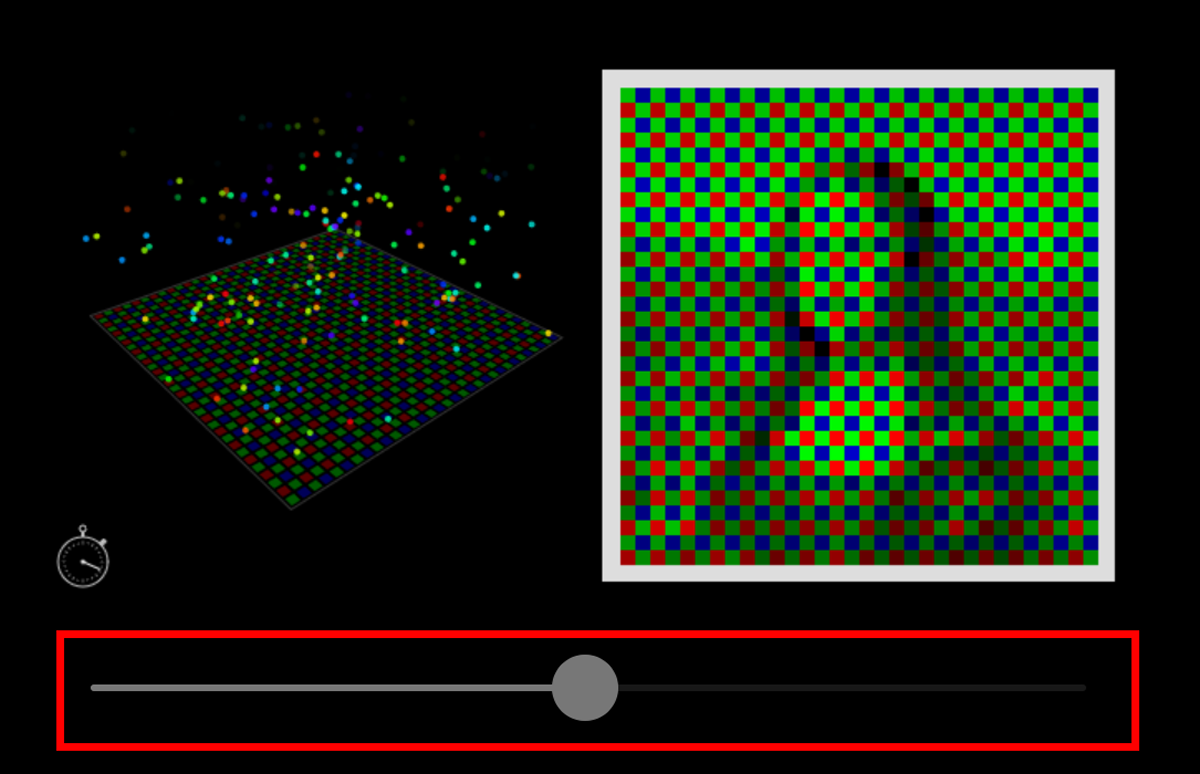
バーを動かすことでそれぞれのフィルターを通過した光子がどのように表示されるか確認できます。このフィルターは色の強度のみを認識し具体的な色までは表示できません。
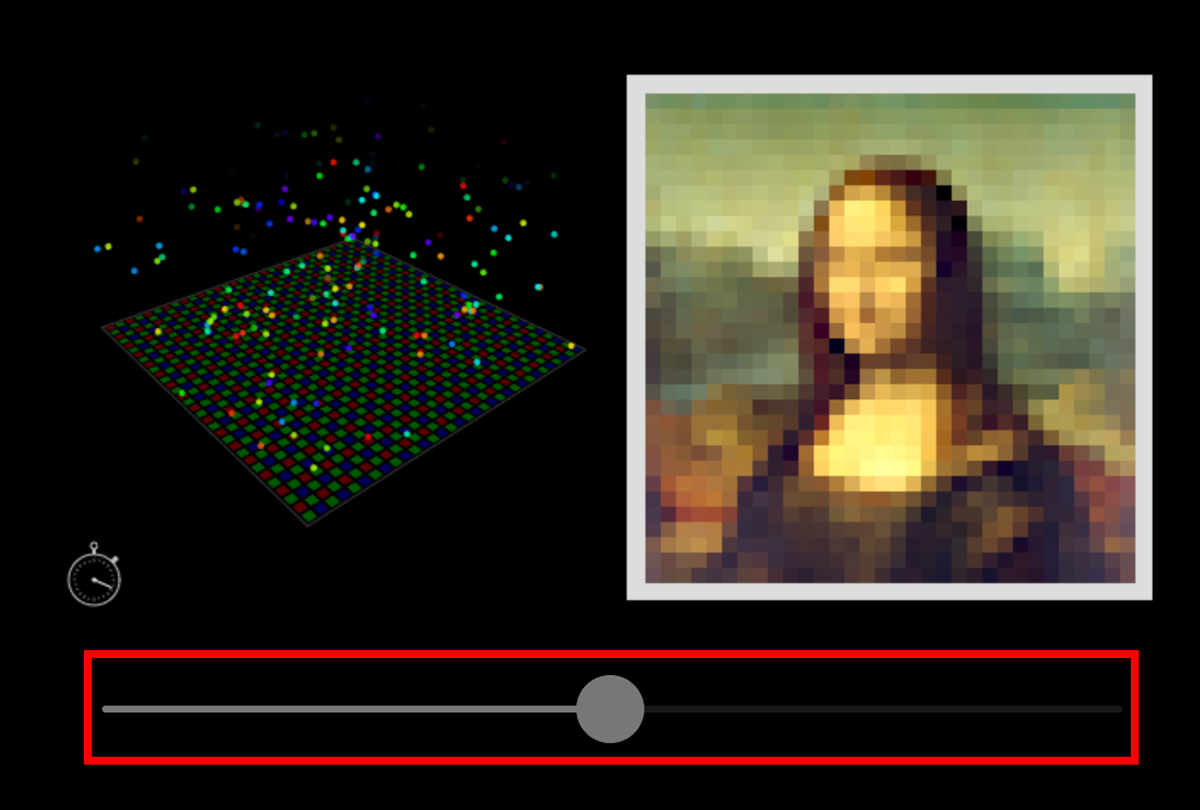
通常の画像を表示する最後のステップとして「デモザイク処理」と呼ばれる処理が必要になってきます。この処理によってそれぞれのフィルターを通過した光子の色を隣の色で補完し、元の色をある程度再現することが可能。黒のバーを動かすとデモザイク処理が行われる過程を確認できます。この処理でも、画像の全体的な明るさは光子が通過する時間の長さに依存し、この時間が「シャッター速度(露光時間)」と呼ばれています。
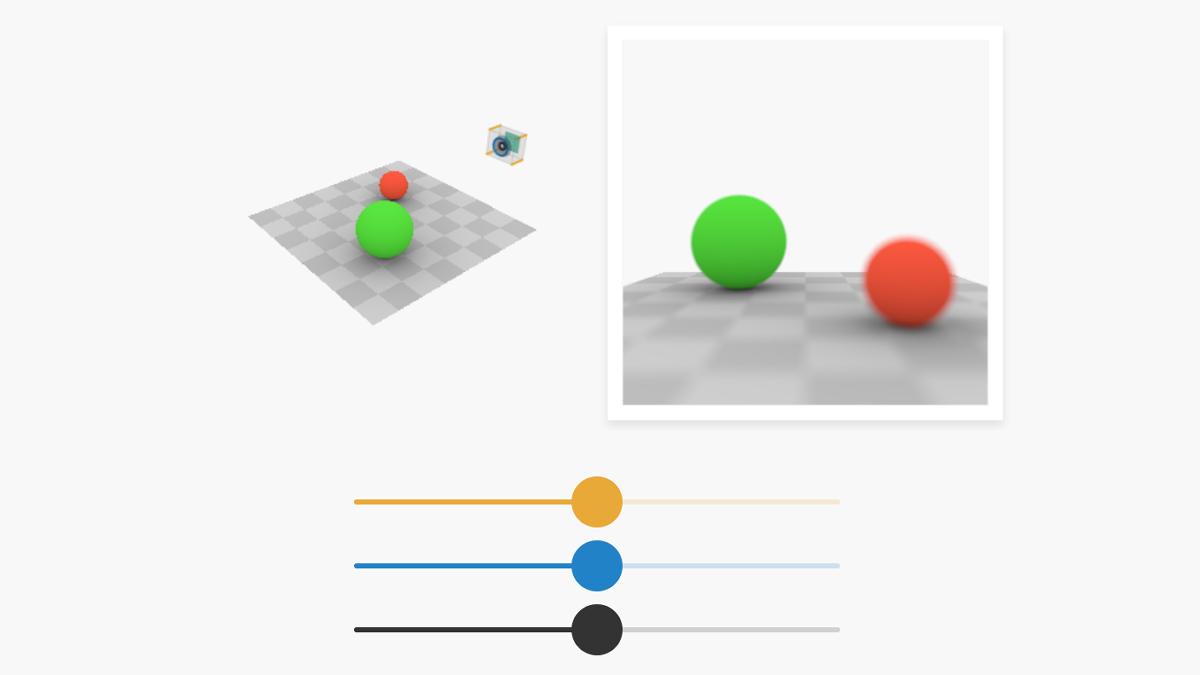
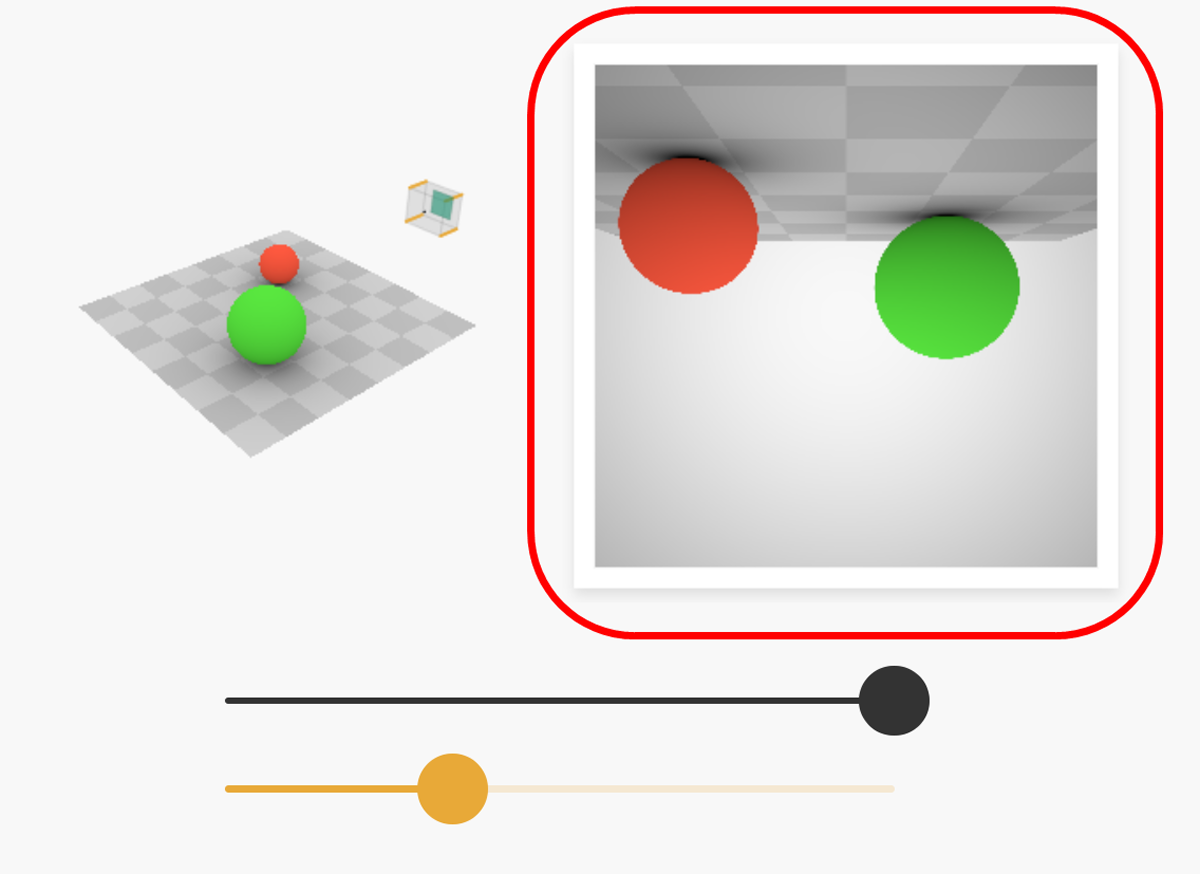
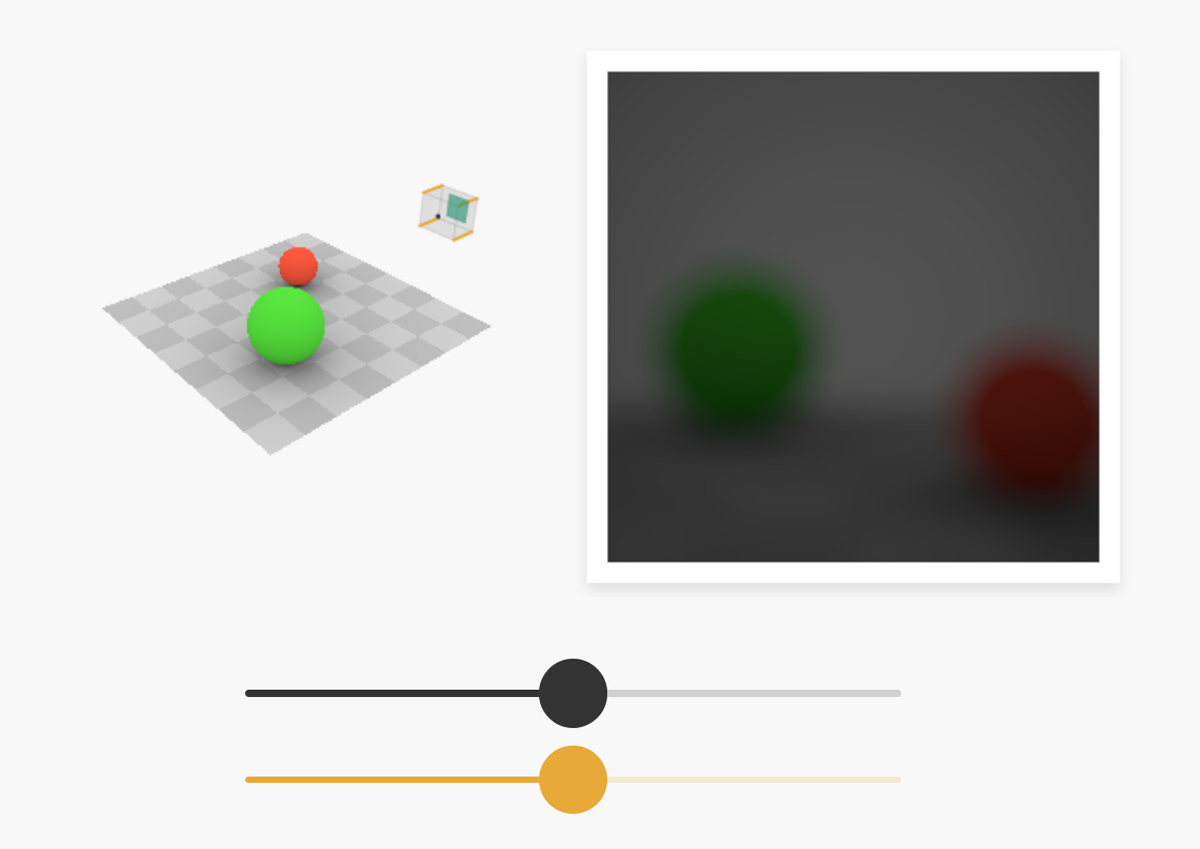
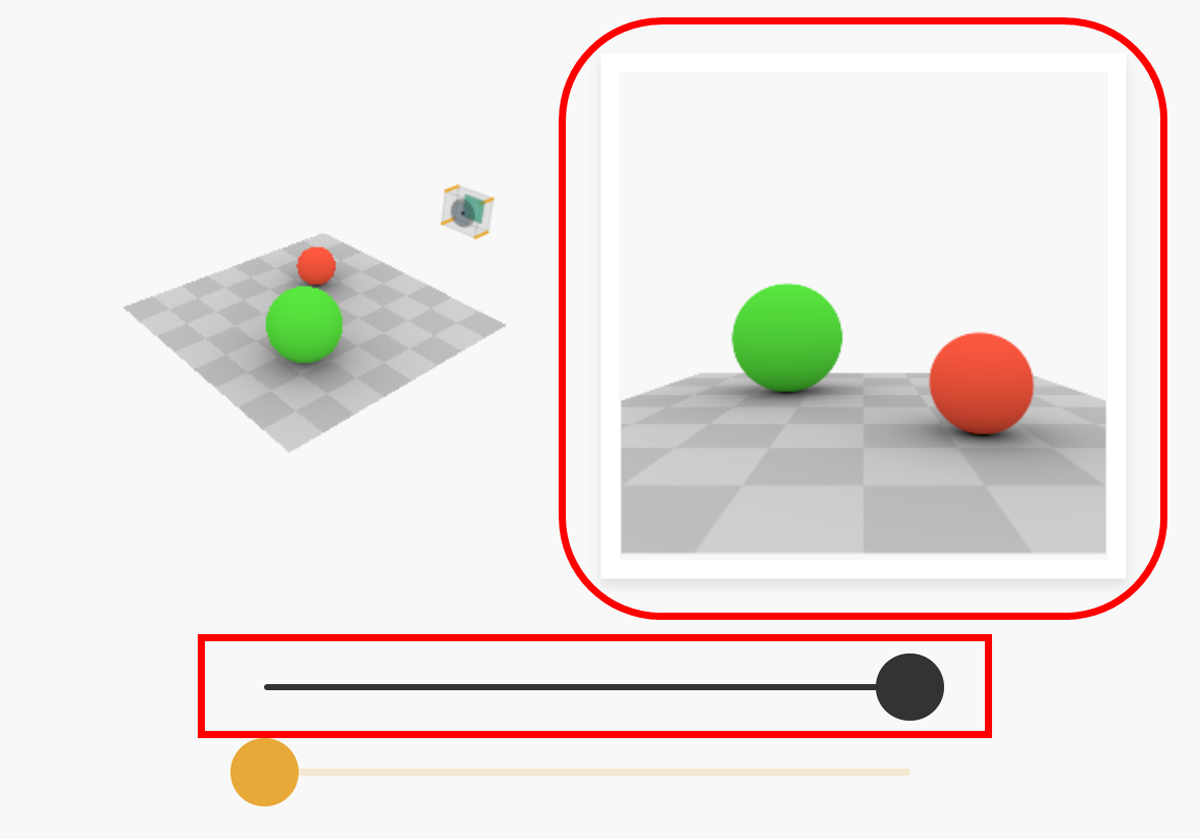
モデルが光の中に移りました。ここまでで作り上げたイメージセンサーとカラーフィルターを持ち、デモザイク処理が可能なカメラで球体を写しているのですが、光の中では全く何も表示されません。
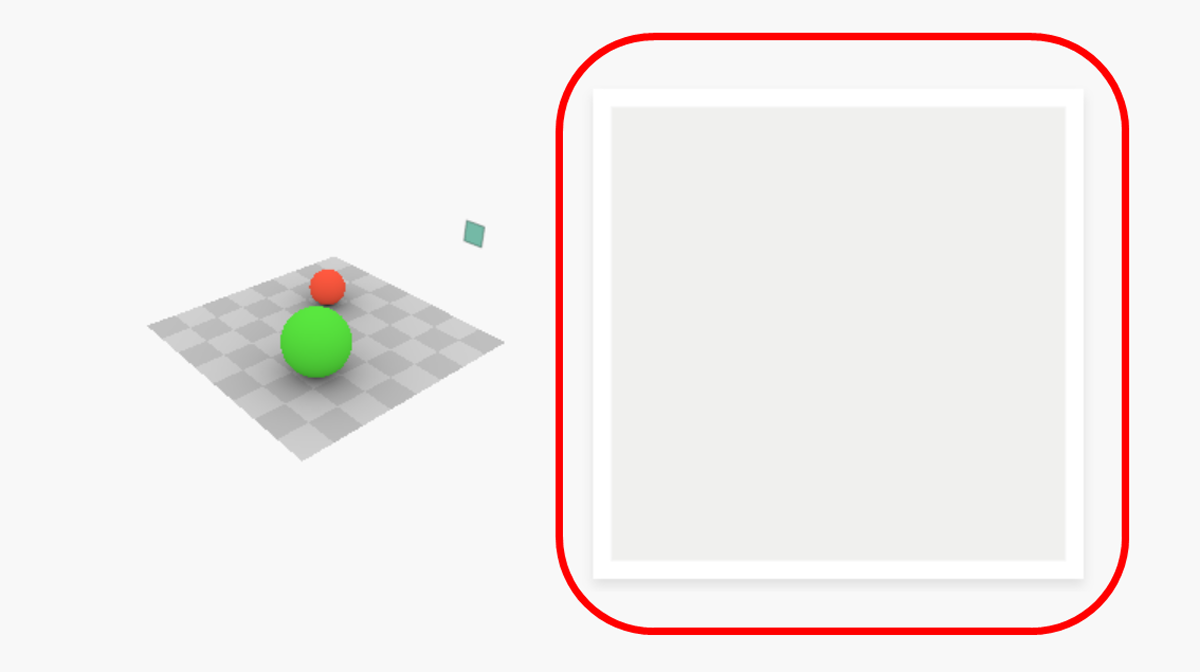
この理由は光子が光を収集するセンサーに一点で集められているため。赤い球は赤色を反射し、緑の球は緑色を反射しますが、反射したその全ての色が以下のようにあらゆる方向から一点で集められているため、カメラには何も写っていないように見えるということです。

中間おすすめ記事 (外部サイト)












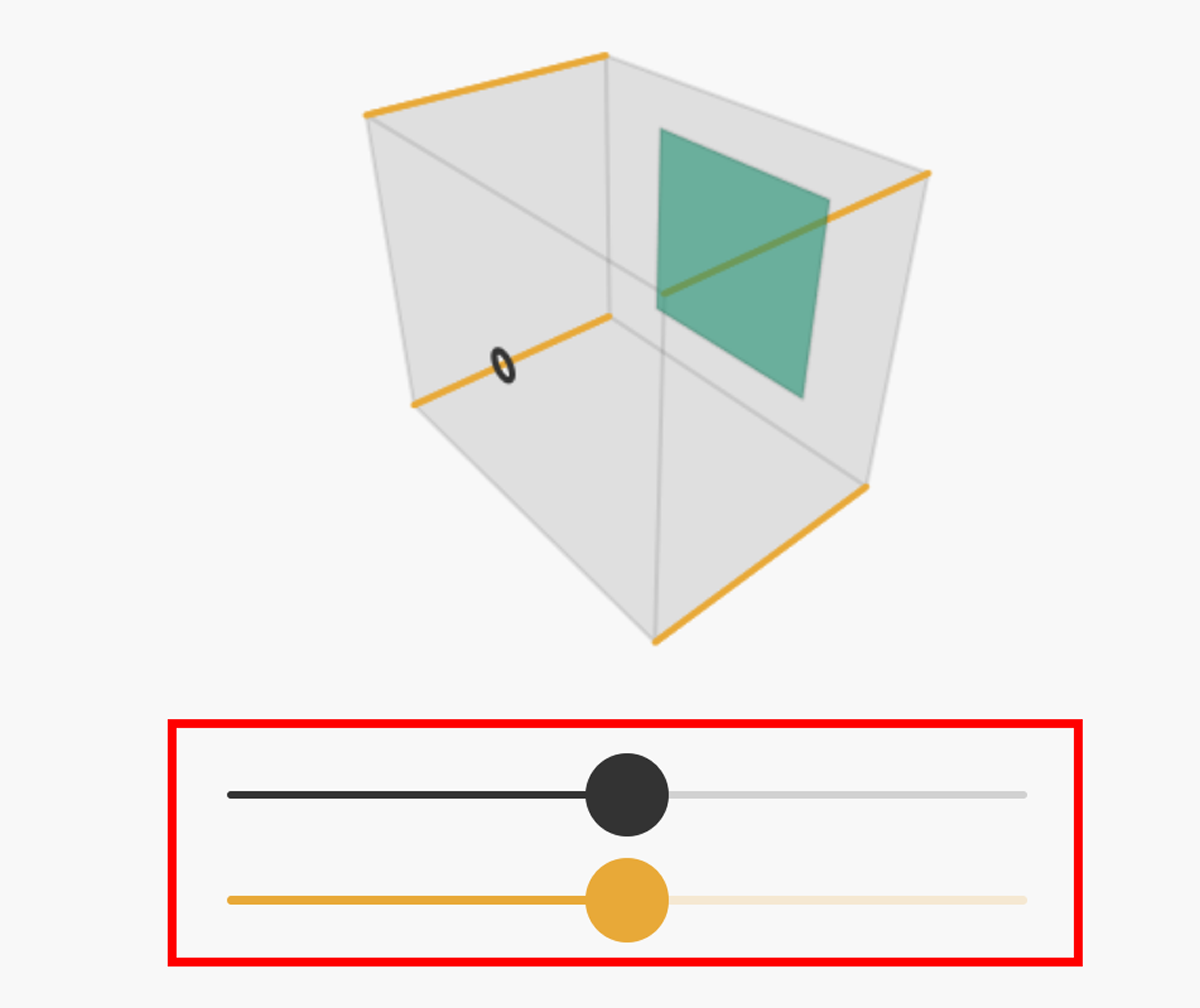
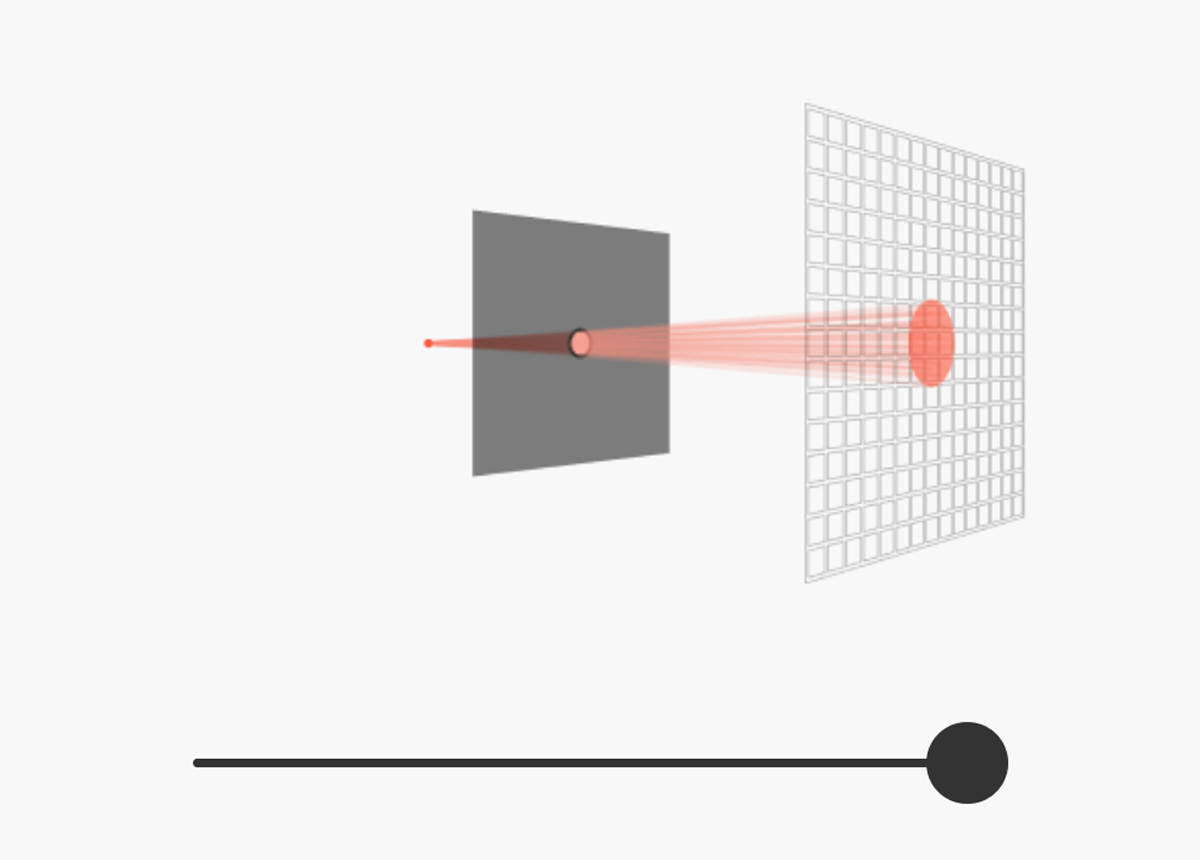
正常に画像を表示するためにはセンサーを通る光子の範囲を制限する必要があります。チェハノフスキー氏は箱のモデルを作成して中にセンサーを入れ、正面に小さな穴を作成しました。黒のバーで穴の大きさ、オレンジのバーで穴からセンサーまでの距離を変更できます。この箱の内側は黒色に設定されており、箱の中で光が反射することはないとのこと。またセンサーを箱の内部後方に配置し、穴を通った光が当たるようにしています。この箱はいわゆる「ピンホールカメラ」です
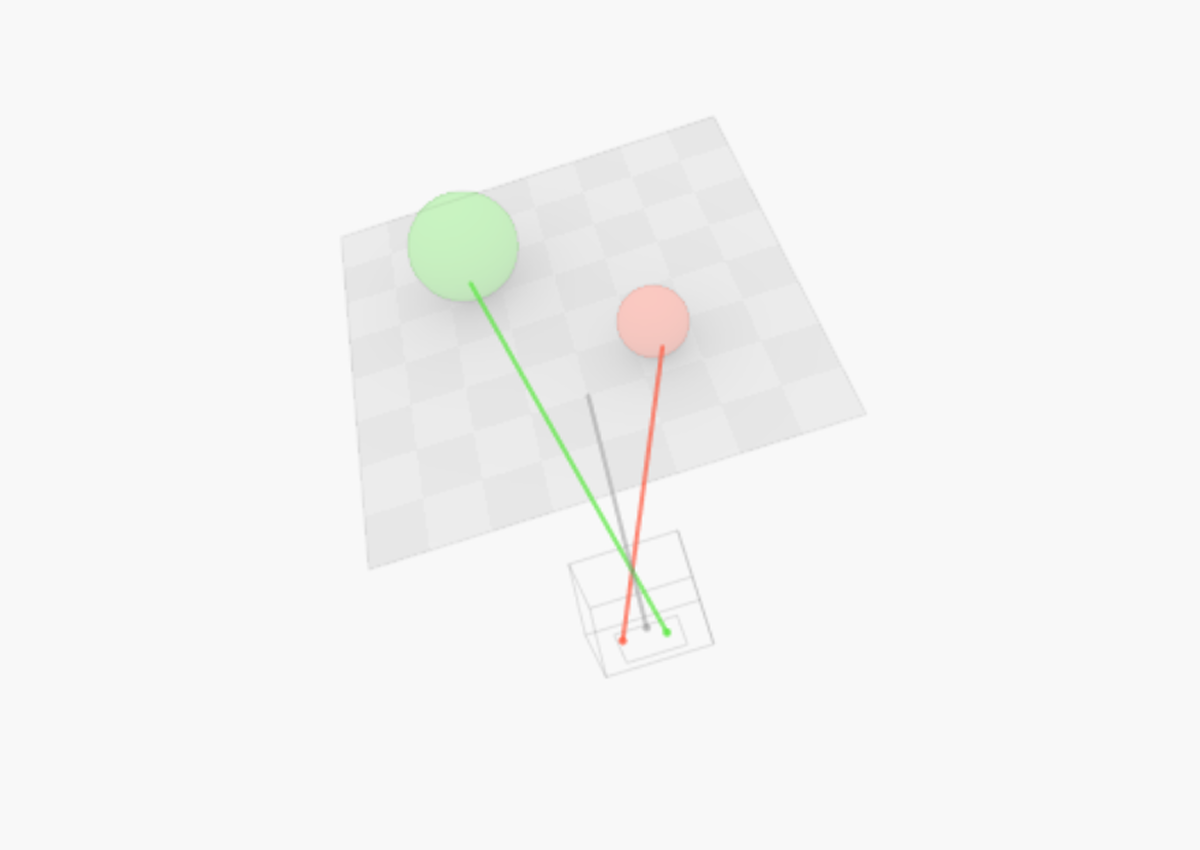
黒のバーとオレンジのバーを動かすことで、球体がセンサーにどのように表示されるかを確認できます。ここで分かることは、画像が上下左右反転して表示されているということ。
光は以下のように穴を通る際に交差するため、反転して表示されるとのことです。
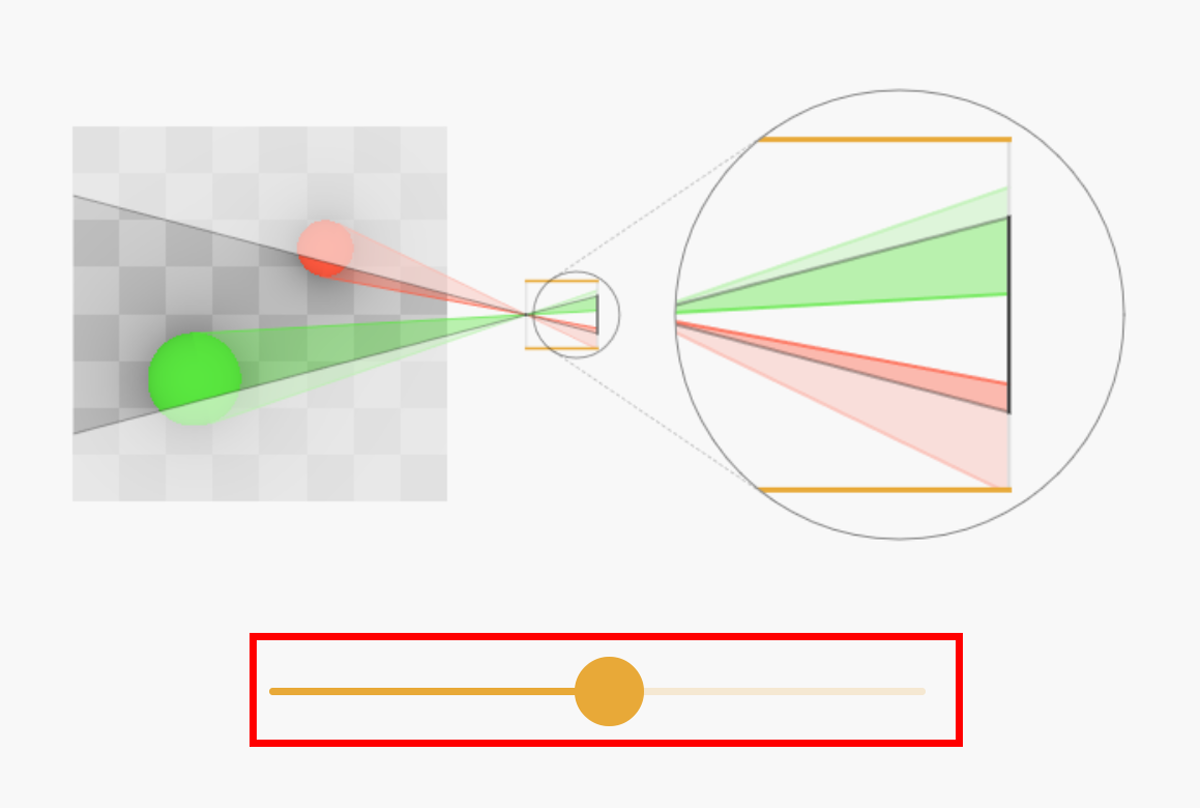
穴からセンサーまでの距離を変えると表示できる範囲が変わることはオレンジのバーを動かすことで確認できます。

全ての光は穴を通過しているものの、穴からセンサーまでの距離を変えることでセンサーに当たる範囲が変わり、表示される範囲も変わっていくということ。モデルを上から見た図も用意されているため、光が当たる範囲が変わる様子も確認できます。
また、穴のサイズが大きくなるとセンサーに当たる光の範囲も大きくなることが分かります。
しかし穴の大きさを変更できる仕組みを先ほど作成したカメラと組み合わせると、センサーに当たる光子が少なくなるため、以下のように画像が暗くなってしまいます。これはイメージセンサーの感度(ISO感度)を上げることで明るくすることができるのですが、画像にノイズが発生する恐れや画像のぼやけが発生する恐れがあります。
他にも焦点という穴を通った光線が交差する点にセンサーを設置することで画像のぼやけや明暗の問題を解消する方法があるのですが、そのためには穴を適切に制御する必要があります。
穴の部分に直線で形作られたガラスを置き、光線を通過させてみるとこのように屈折します。光線を1箇所に集めるためには上向きと下向き両方のガラスを組み合わせる必要があります。
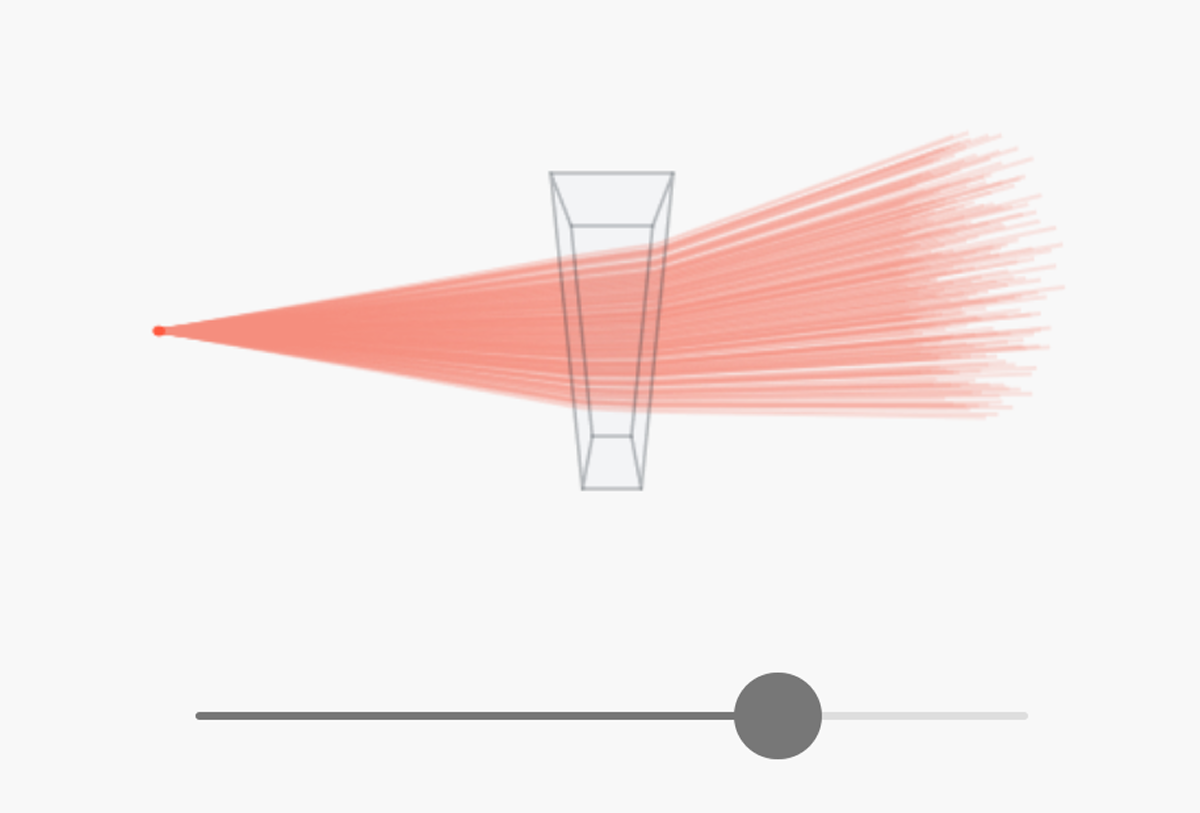
ガラスを何枚か組み合わせると、光線が1箇所に向けて屈折します。ガラスの数が無限大に近づくほど精度は高くなりますが、まだ完璧ではありません。
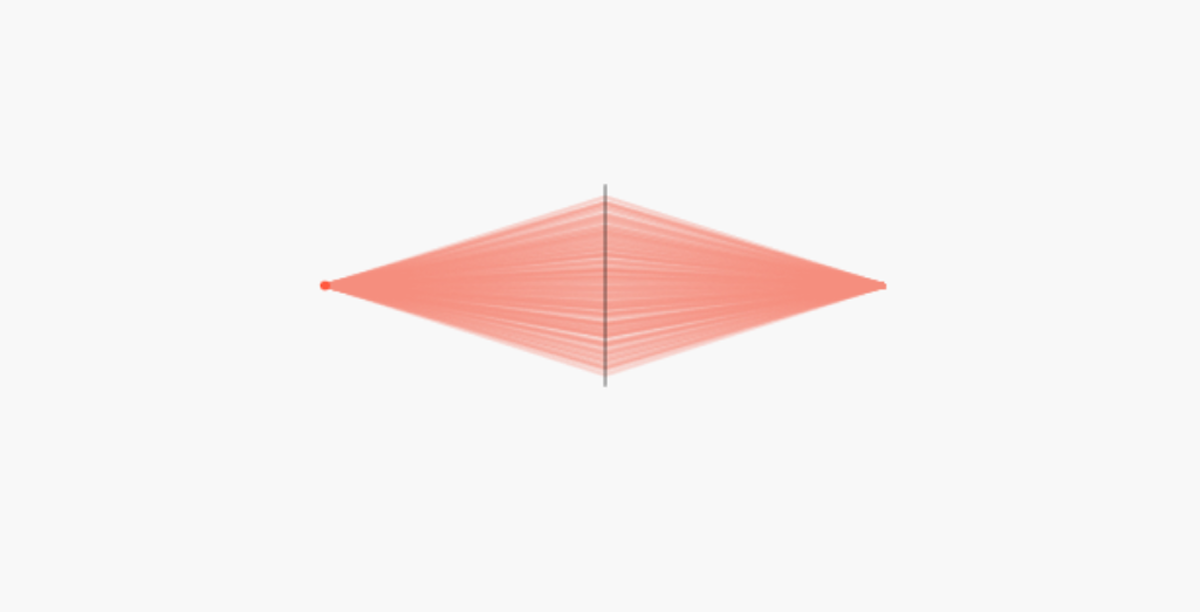
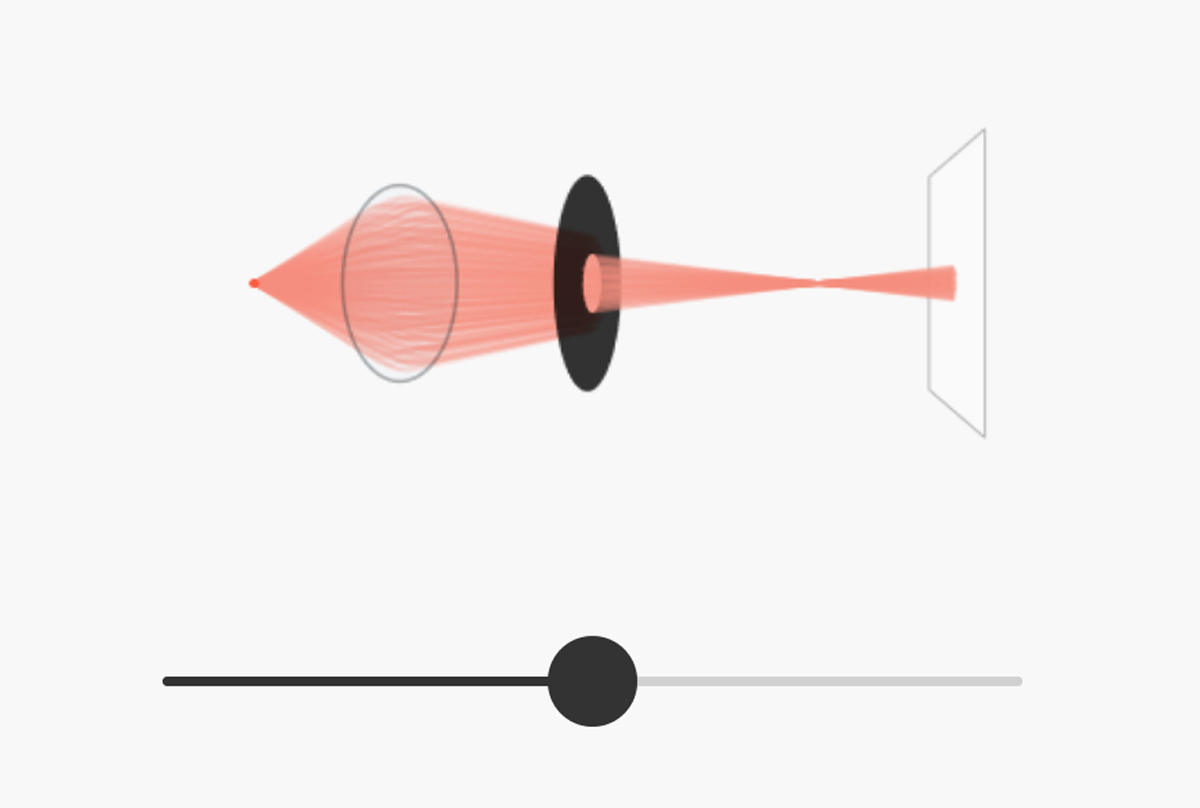
滑らかな形状の凸型レンズを作成することで、光線が1点に集中するようになりました。レンズの主点から焦点までの距離が焦点距離です。
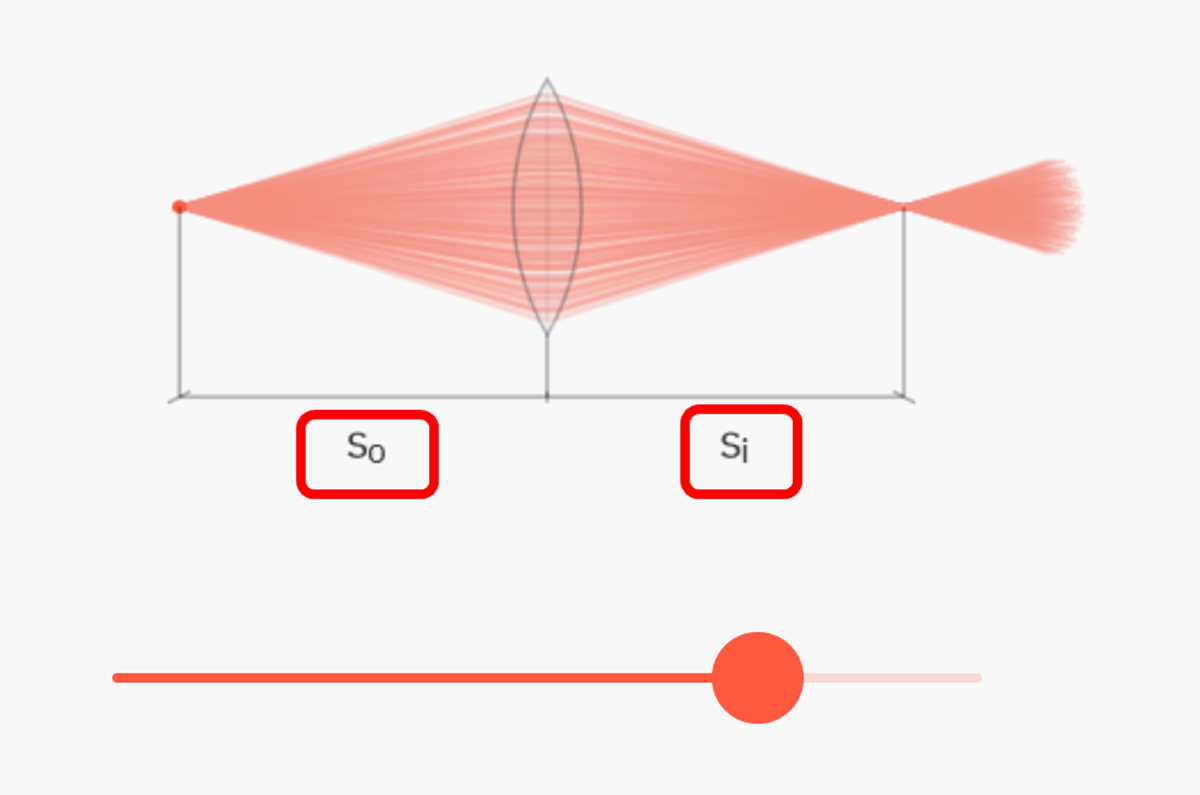
焦点距離(f)はレンズの屈折率(n)とレンズの形状によって異なります。屈折率とレンズが小さいほど焦点距離が長く、大きいほど短くなります。

レンズを作成したモデルに取り付けました。これ以降のモデルでは青のバーで焦点距離そのものを変更可能できます。

焦点距離と穴からセンサーまでの距離を変更するバーを操作すると、画像にピントが合う様子が確認できます。本来はピンホールカメラと同じように反転して表示されるのですが、今回の場合修正して表示しているとのこと。
焦点距離と穴からセンサーまでの距離が変更できるようになっても、画像にピントを合わせるためにはカメラの位置を固定しておかなければならないため、カメラをどの位置に動かしてもピントが合うようにする必要があります。しかし焦点距離が固定された単焦点レンズは生物の「目」と違い形状を変化させることができないため、いくつかのレンズを組み合わせて使用する必要があります。
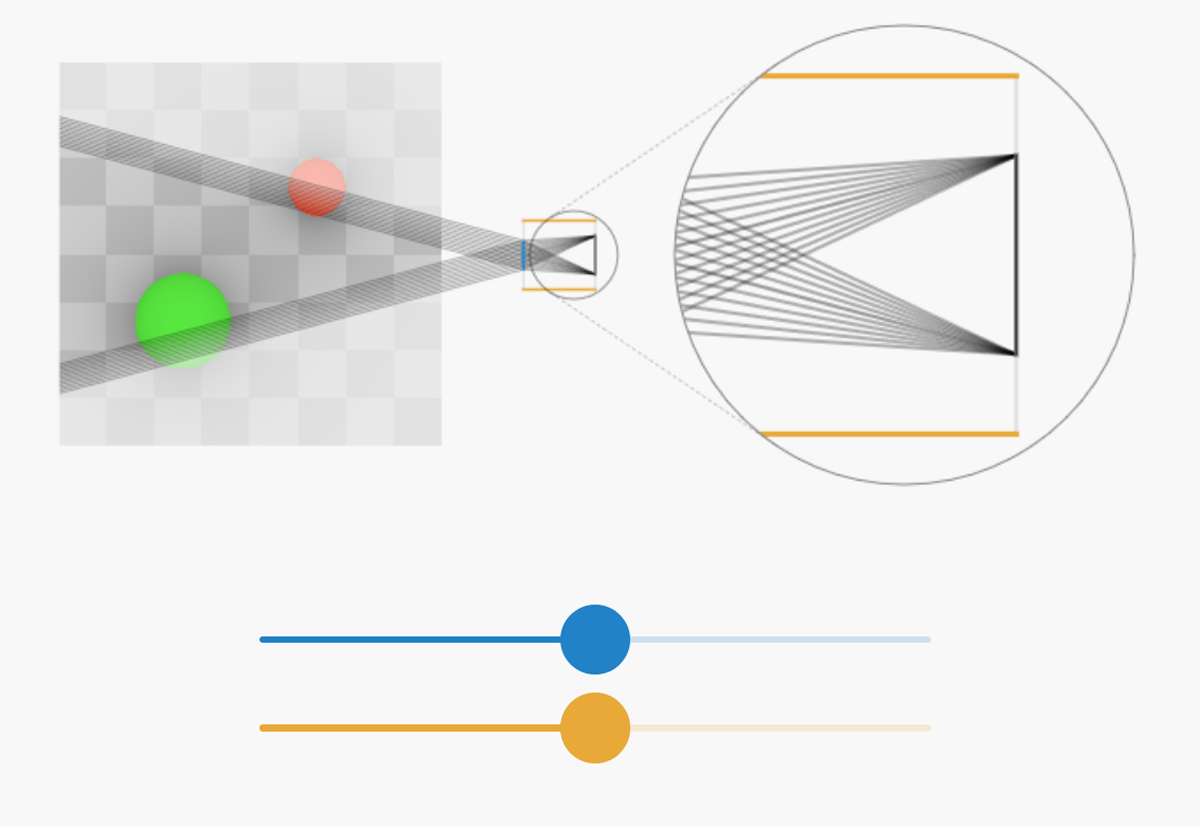
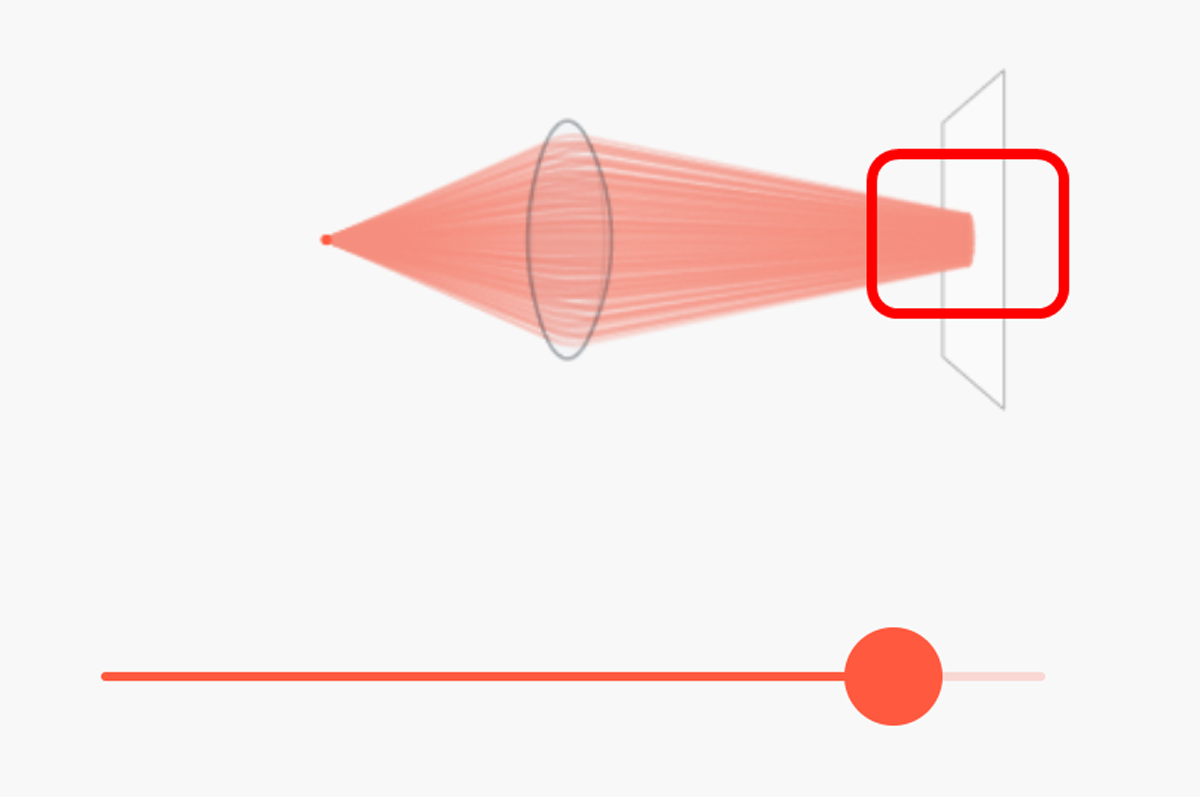
被写体がレンズに近づくと焦点がセンサーに合わず光線が円形に広がりますが、この円は「錯乱円」と呼ばれます。実際にはセンサーの位置を完全に焦点に合わせることは不可能なのですが、この錯乱円がある程度の大きさであれば人間の目にはピントが合っているものとして映ります。
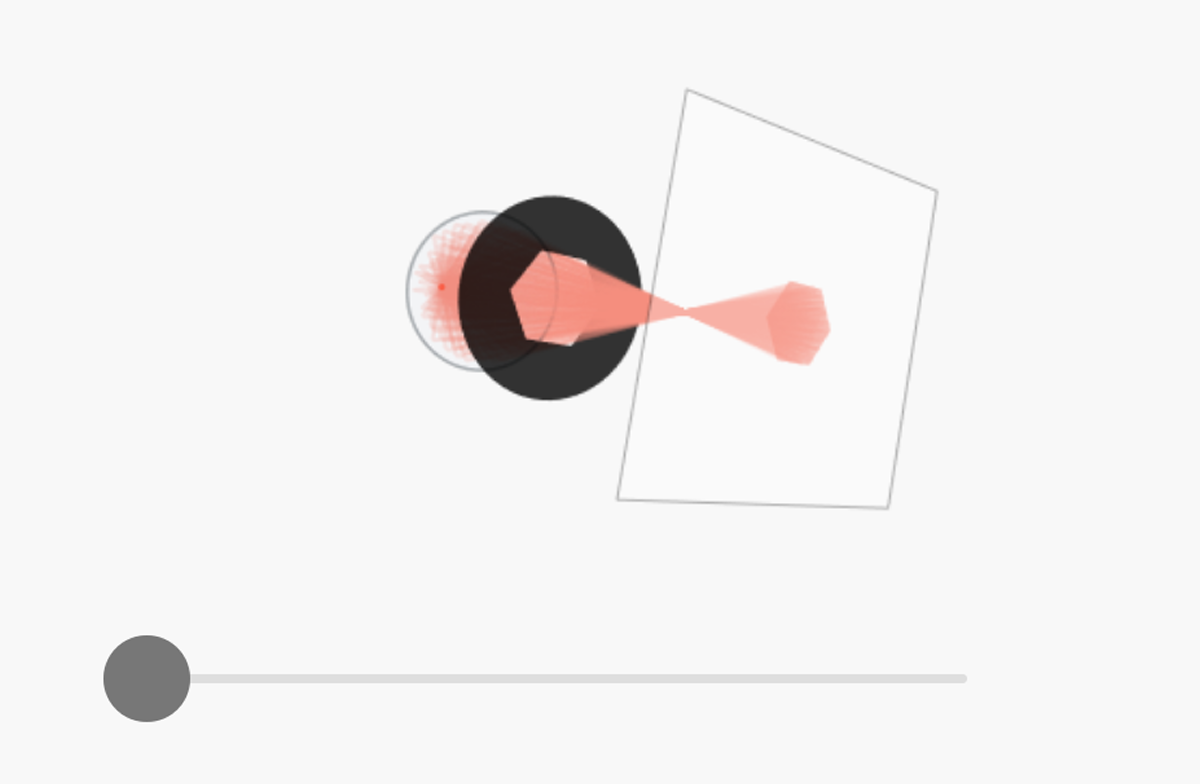
錯乱円の大きさを調節するにはレンズから焦点まででかたどられた「光円錐」と呼ばれる円すいの角度を浅くする必要があります。そのために使用されるのが「絞り」と呼ばれる板で、これを穴に取り付け大きさを調節することで、穴を通る光線を直接さえぎることが可能です。
絞りは実際のカメラでは何枚かの板を組み合わせたものになっています。
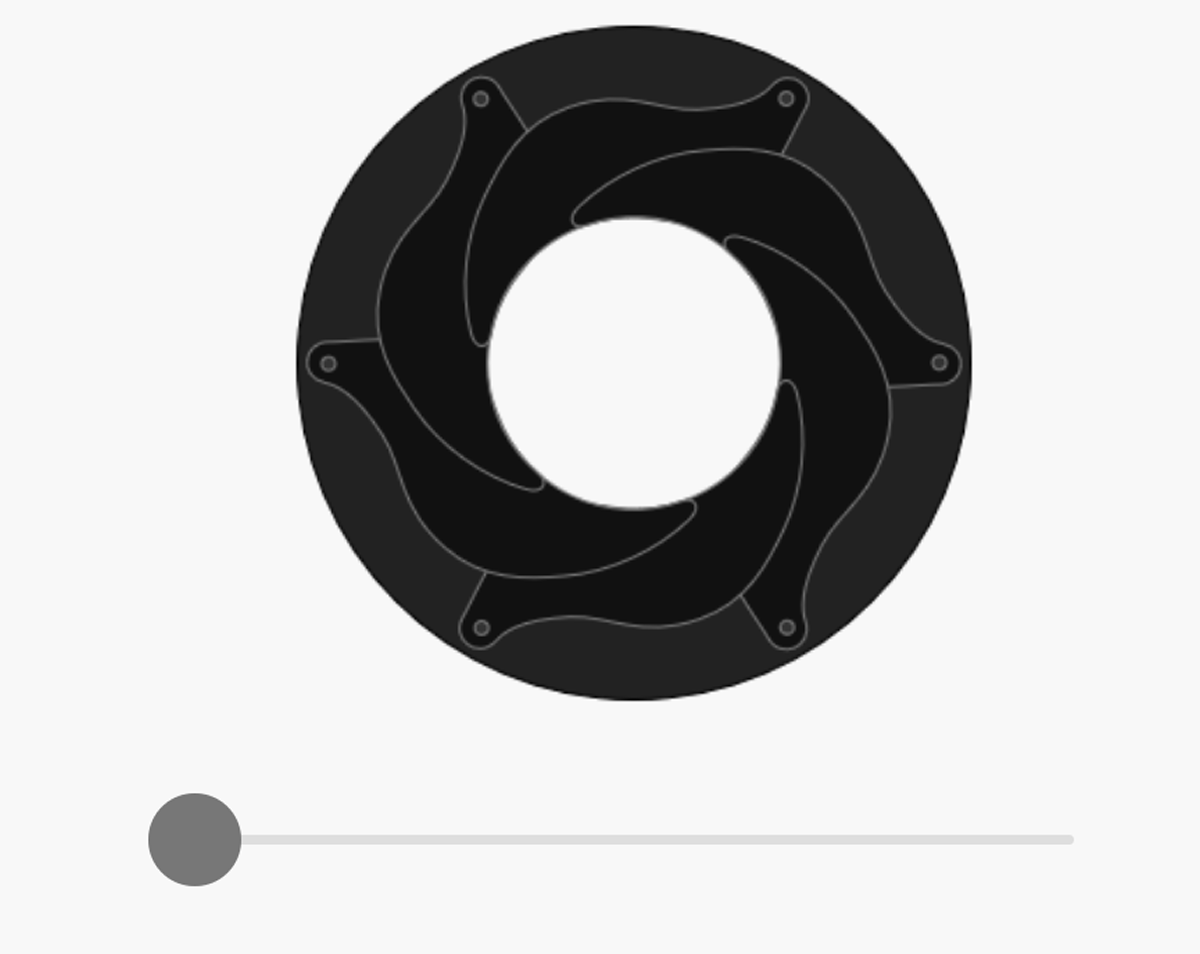
絞りの開口部は多角形になっているため、写真に生じるボケもしばしば多角形になるといいます。
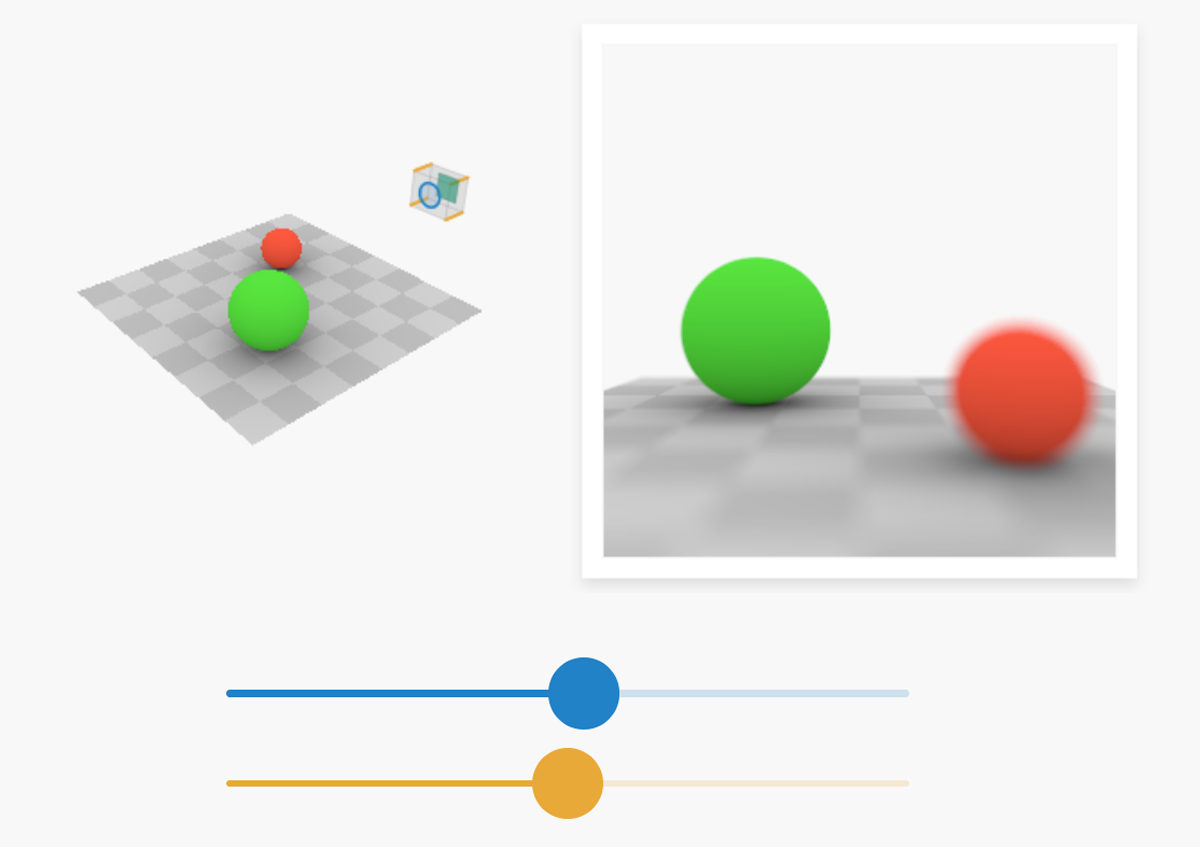
絞りの開口部の大きさが小さい(絞り値が大きい)ほど、撮影した画像の、より広い範囲にピントが合って鮮明になり、このピントがあっている範囲を「被写界深度」と呼びます。
以下の黒(開口部の大きさ)、青(焦点距離)、赤(カメラに対する被写体の位置)のバーを動かすと、3Dモデルに表示された2つの青点間で表された被写界深度が変わることが分かります。開口部の大きさが小さく焦点距離が長いほど被写界深度は広がり、開口部の大きさが大きく焦点距離が短いほど被写界深度は狭くなります。被写体の位置を表した赤点が被写界深度の範囲内にあると、ピントがあった画像になるということ。
この解説では理論上のレンズで話を進めてきたものの、現実では被写体を像に変換する際にボケやゆがみなどが発生してしまうとのこと。こういった現象にはさまざまな種類があり、特に単色光に関する5つの現象はザイデル収差という名前で分類されています。チェハノフスキー氏は「撮影はスマートフォンやデジタルカメラのシャッターボタンを押すだけの簡単な作業に見えますが、実際には綿密に誘導された光線と精密機器のおかげで現実を永久に残るものにしているのです」と締めくくっています。
・関連記事
20世紀から現代までのカメラの歴史を名機で振り返るムービー「HISTORY OF THE PHOTO CAMERA」 – GIGAZINE
世界一小さな「マイクロ写真」が19世紀に大流行した理由とは? – GIGAZINE
高画質を追求してきたカメラは今後「見えない物を撮る」方向へと進化していく – GIGAZINE
Source: ギガジン
カメラに被写体がどのように映るかを3Dモデルで解説したサイトはこんな感じ